Description
I had purchased a rowing machine. Unfortunately, the machine did not calculate some values correctly, such as average Strokes Per Minute. Since I had a Raspberry PI and an ultrasonic sensor left, I thought I would try to build this myself. The result is the RP Rower.
Of course, not all values can be calculated exactly, such as the distance per stroke, but the curiosity was aroused in me to try it out.
Hardware
- Rowing machine
- Raspberry Pi 4
- Ultrasonic sensor HC-SR04
- Resistors
- Breadboard
- Wires
Set-up
- Set-up the Raspberry Pi with the sensor. You find enough tutorials in the internet to connect the sensor with the Raspberry Pi.
- The sensor measures the distance from the sensor to an object and it must be attached to the rowing machine. In my case I attached the sensor under the hold for the feet. The object was placed under the seat.
- Clone the git project on your Raspberry Pi. https://github.com/TestAndWin/rp-rower
- Maybe you have to adapt the constant
FACTOR_DISTANCEin the filerower.py. This is used to convert the distance measured by the sensor to the distance of the stroke. As said, the distance value can only give a rough indication.
Running
- Start the RP Rower with
python3 rower.py
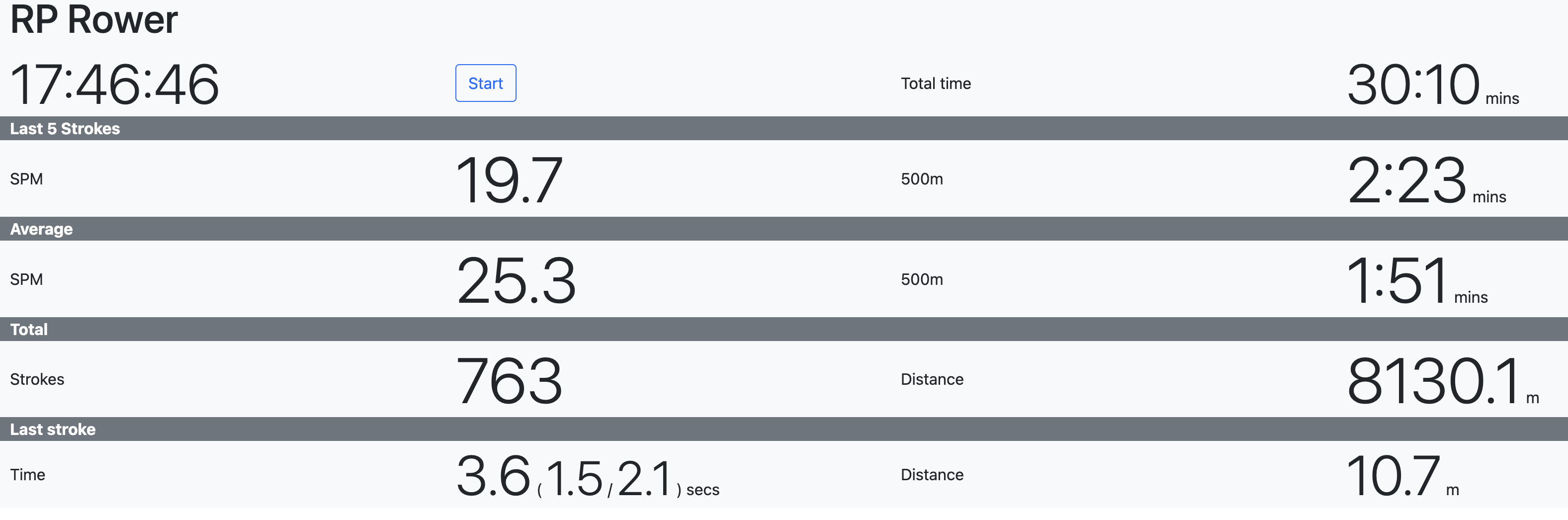
User Interface
- Connect with a device like a tablet to the rower, the server is running on port
5000. - Click on Start button and start rowing 🙂